
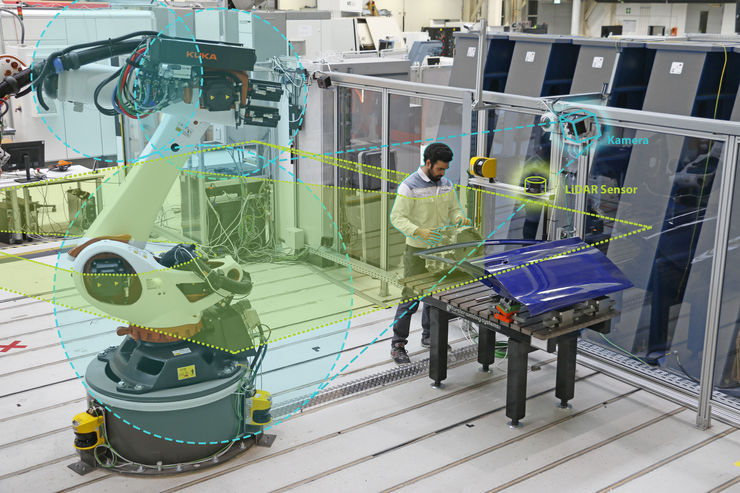
Industrial manufacturing processes should be efficient, flexible and safe for employees. When humans and robots work together on complex tasks, it is important to avoid conflicts between these requirements. The Fraunhofer IWU team led by Aquib Rashid M.Sc., Ibrahim Al Naser M.Sc. and Dr.-Ing. Mohamad Bdiwi is developing a speed controller and a multimodal, comprehensive perception system for this purpose. The central question for the researchers in an application at SEAT S.A. was: How can a robot better assess its environment thanks to "extra eyes" and thus maintain more speed in its path? To do this, the team redivided the perceptual areas - into smart zones. In the case of faster movements, such a zone "grows" to exclude the risk of collision with humans. LiDAR (Light Detection and Ranging) sensor technology, which uses pulsed laser light to detect and categorize objects, is also used for environment detection, as are cameras. The combination of reaction times (LiDAR: 50 milliseconds, camera: 10 ms) and monitoring areas (LiDAR: larger areas; camera: near field) now allows faster movements of the robot. The exact factor by which process times can be reduced depends in each case on the activity and on the hardware used for robotics and LiDAR sensor technology. For safety, the robot's movement still has to be slowed down when approached by a human, but significantly less than before: around 25 percent faster robot movements mean a considerable gain in efficiency. Adjustment options for movement speed and acceleration also increase acceptance among employees. The software package also includes a module for assessing all safety aspects. These can thus be taken into account at an early stage in plant planning, technically documented and digitally certified. This means that all relevant data is available in the digital image of the plant for subsequent changes.
Safe and effective human-robot collaboration in industry
The research results are part of the EU project Sharework. In it, a European consortium of six research institutions, thirteen companies and a standardization body developed new solutions for human-robot collaboration. The various software and hardware modules enable heavy-duty robots (industrial robots) in particular to interact with humans without the need for physical protective barriers such as fences. The goal was to overcome existing barriers in human-robot collaboration (HRC) in the sense of more effective collaboration - without compromising safety. The focus of Fraunhofer IWU's work was on overarching safety aspects (Global Safety System). The result: a modular system capable of understanding a robot's environment and human actions through knowledge and sensors, predictions of future states, intelligent data processing, augmented reality, and gesture and speech recognition technology. The developed modules have already been tested in the automotive, railroad, metal and capital goods industries. However, their use is also conceivable in other industrial assembly and production processes to improve the efficiency of manufacturing processes.
Autor(en): wi




